
For higher force applications an iron core brushless linear motor is used. In this case the moving coil assembly is magnetically attracted to the stationary magnet assembly, which provides a preload for the crossed roller bearing system. For lower force applications and where velocity ripple is a concern due to cogging, an ironless core brushless linear motor is used
The dual parallel rail sets offer excellent load carrying capability.
The wide, low profile of the stage ensures a stable platform for the payload or as the bottom axis (X axis) of a stacked multi-axis system.
The small overall package size makes the XRS stage ideal as a Y or Z axis for short stroke positioning applications.
The XRS stage comes standard without bellows (folded way covers) , but they can be added as an option.
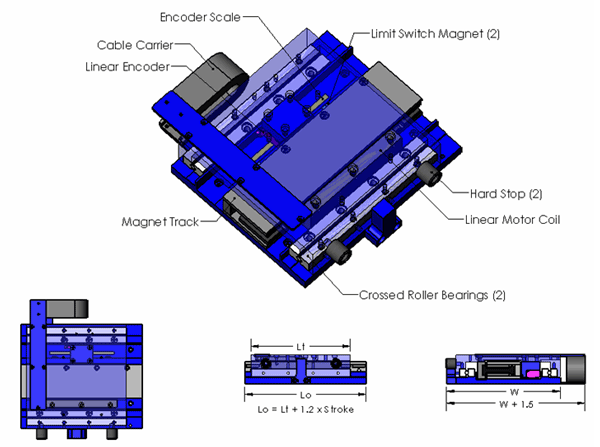
A cable carrier is not supplied with this stage because of the short stroke, but can be added as an option, if desired.
The XRS positioning stage incorporates the latest in linear motion technology:
- Motors:
1) non-contact 3 phase brushless , low cogging, iron core linear motor, commutated either sinusoidally or trapezoidally with Hall Effects. There is a large magnetic attractive force which provides a preload for the crossed roller bearing system. The encapsulated laminated coil assembly moves and the multi-pole single sided permanent magnet assembly is stationary.
2) non-contact 3 Phase Brushless Linear Motor, Ironless Core, commutated either sinusoidally or trapezoidally with Hall Effects. The encapsulated coil assembly moves and the multipole permanent magnet assembly is stationary. The lightweight coil assembly allows for higher acceleration of light payloads - Bearings: Linear guidance is achieved by using a 2 parallel sets of crossed roller rails. The rollers and retainer are not sealed Periodic lubrication of the guides is recommended.
- Encoders: Non-contact glass or metal scale optical linear encoders with a reference mark for homing. Multiple reference marks are available and are spaced every 50 mm down the length of the scale. Typical encoder output is A and B square wave signals but sinusoidal output is available as an option
- Limit Switches: End of travel limit switches are included at both ends of the stroke. The switches can be either active high (5V to 24V) or active low. The switches can be used to shut down the amplifier or to signal the controller that an error has occurred. The limit switches are typically an integral part of the encoder, but can be mounted separately if required.
- Cable Carriers: Non standard can be added as an option.
- Bellows: Non standard can be added as an option.
- Hard Stops: Hard stops are incorporated into the ends of the stage to prevent over travel damage in the event of servo system failure.
Advantages:
- Wider footprint, very stable platform
- Lowest Profile
- Ideal for short stroke servo applications
- Large load carrying capability
- Smooth Operation
Applications:
- Pick and Place
- Vision Inspection
- Parts transfer
- Clean room


Loading...
| Flatness | ± 0.0005 in/ft | ± 42 micron/meter |
| Straightness | ± 0.0005 in/ft | ± 42 micron/meter |
| Accuracy* | ± 0.0002 in/ft | ± 33 micron/meter |
| Repeatability* | ± 0.0002 in | ± 5 micron |
| Load Capacity | 100 lbs | 45 kg |
Required Electronics:
The motor requires a 3 phase brushless amplifier with power supply, that is rated with sufficient current and voltage to meet the motion requirements. The inductance of the linear motor coil should be greater than the minimum load inductance of the servo amplifier. A programmable motion controller is required to close the position loop on the system.
Environmental Considerations:
The stage is a precision device with sensitive components, it should not be mounted in an environment that is wet or excessively dirty. The optical encoder scale is open and it should be kept free of debris in order to operate properly. The stationary magnetic assembly is highly magnetic, it should not be placed in an area where loose steel particles can be drawn towards the open magnetic surfaces. The stage must not be mounted in an environment with high ambient temperatures.
Mounting:
The stage should be mounted to flat and stiff surface. Counter bored thru holes are present in the stage to allow for the mounting of the stage to the customers system. The moving table assembly has threaded holes on the top surface for attaching the payload. The stage may be mounted in any orientation. When mounting the stage with the table moving vertical, it should be noted that the stage will be required to generate additional force due to gravity and that the stage will slide down to the bottom hard stop when power fails.
Maintenance:
The cross roller bearings in the stage should be periodically lubricated with the manufacturers recommended grease. The open glass encoder scale should be wiped with a glass cleaner occasionally to ensure trouble free operation.


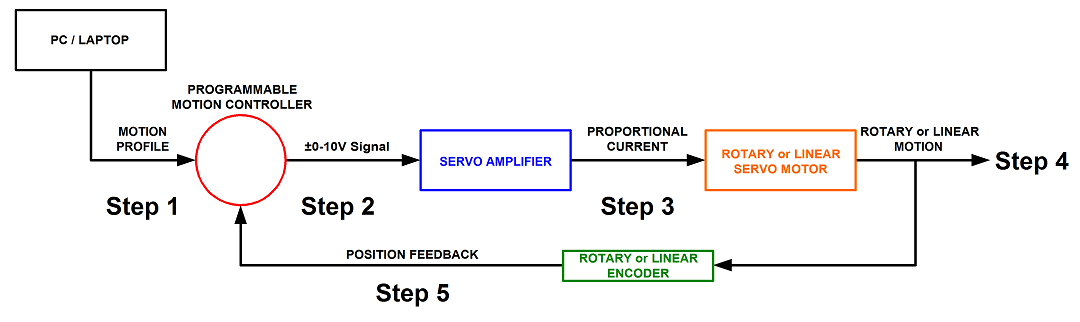
Step 1. A program or motion profile will be written on a PC or laptop and downloaded to the motion controller. This program will contain parameters such as speed, acceleration, deceleration, PIDs, desired position, etc…
Step 2. Based on the program parameters, the motion controller will send a +/- 10V reference signal to the servo amplifier.
Step 3. The servo amplifier will take the reference input signal and provide the necessary current to generate the required force from the motor to move to the desired position.
Step 4. The motor will move to the desired position at the programmed speed and acceleration.
Step 5: Motor position is sent back to the controller (typically 500 times per second) to verify that the desired position has been reached and maintained.