In engineering applications that require a limited range of motion, a voice coil or non-commutated direct current linear actuator is often the preferred choice. The ironless core coil assembly has no magnetic attractive force to the stationary magnet assembly, which reduces the load on the bearing system and increases its life. There are also no magnetic drag forces (hysteresis), which allows for higher accelerations. This type of actuator particularly excels in high-velocity or high-frequency solutions where direct drive is required. Notably, the absence of electrical components, such as hall effect sensors, contributes to a more streamlined and reliable system overall.
Moreover, the voice coil actuator operates on the principle of the Lorentz force, which means the force it generates is directly proportional to the input current. With its low relative mechanical and electrical time constants, the voice coil actuator is an excellent direct-drive solution for applications that involve rapid changes in direction. Its inherent simplicity, as it doesn't require commutation or a complex driver for operation, provides a sense of ease and reassurance in its use.
However, due to their simplicity, voice coil actuators require the integration of a linear encoder for precise positioning. To precisely control force, a force transducer must be installed in line to achieve the utmost precision, underscoring the importance of precision in your applications. To accommodate these needs, the voice coil actuator should be integrated into a voice coil positioning stage. The voice coil positioning stage is a compact, small-footprint positioning stage ideal for closed-loop positioning applications with a short stroke where intricate force or position, velocity, and acceleration control is necessary. Its high precision instills confidence in its performance, making it an ideal choice for your applications.

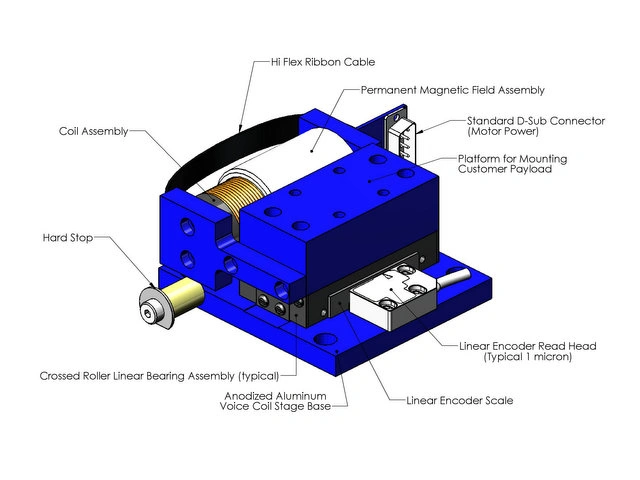
Voice coil stages will, at minimum, have the following elements: a voice coil actuator, a bearing, a feedback device, and mechanical brackets to connect the actuator to the bearing and feedback device. One can use either style of voice coil moving coil or moving magnet in a voice coil stage; depending on the application, one might be preferable to the other since the moving magnet will not have moving leads, but the moving coil will have a lower force to moving mass ratio enabling higher accelerations. The application dictates the type of bearing utilized. Most applications will utilize high-precision ball slides, but for low-stroke, oscillatory systems would require a flexure system, crossed roller bearing, or jeweled or sliding contact bushings in conjunction with a hardened shaft. Air bearings, linear rails, and sliding contact bushings are also available for specific applications. For use as feedback typically, a non-contact optical or magnetic linear encoder with a center reference mark for homing will come standard with resolutions in the range of one micron. Still, more precision is available down into the nanometer range. The typical encoder output is quadrature A and B square wave signals, but sinusoidal output is also available. In specific applications, the user would prefer analog feedback, and the connection of an LVDT or linear potentiometer can be integrated for position feedback, or a force transducer can be connected for force feedback. Additional options include limit switches to shut down the amplifier or signal the controller that an error has occurred and hard stops incorporated into the ends of the stage to prevent over-travel damage in the event of servo system failure.